
On April 24, 2023, Ahmad Rafsanjani gave an invited (zoom) talk “Kirigami metamaterials: from morphing structures to soft robotic skins” in the Mechanics and Materials Seminar series at the Department […]
HFSP Early Career Research Award
Ahmad Rafsanjani (SDU Soft Robotics), Ariel Camp (Liverpool University, UK), and Shahrouz Amini (Max Planck Institute of Colloids and Interfaces, Germany) received an Early Career Research Grant ($ 1.2M) awarded […]

Exhibition in MSU Zagreb
!brute_force – Soft Resilience by Maja Smrekar & Jonas Jørgensen will be exhibited at Museum of Contemporary Art (MSU) Zagreb April 4-30 2023.
Soft Robotics toward UNSDG
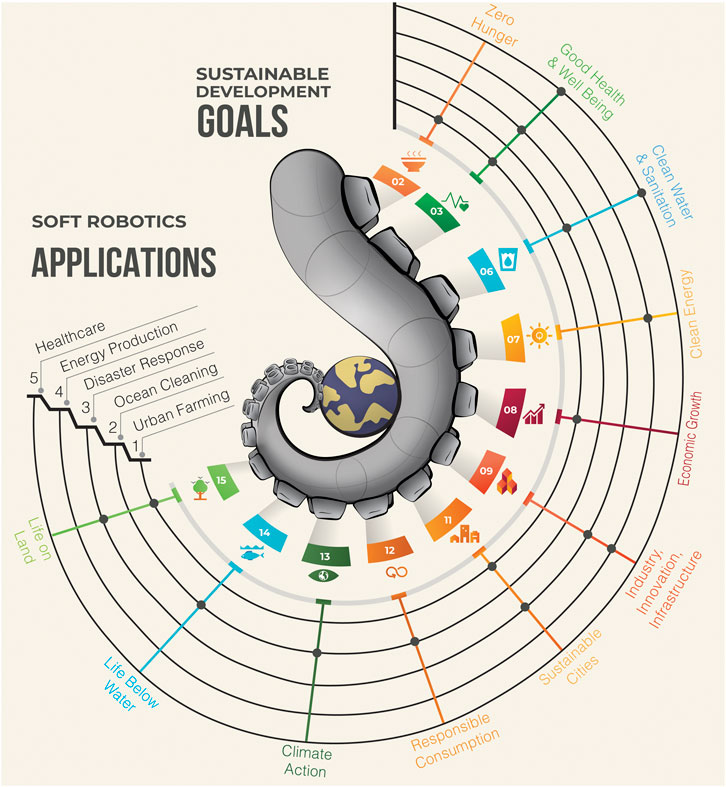
Our Postdoc Saravana Prashanth Murali Babu contributed to a Perspective Article published in Frontiers in Robotics and AI on how soft robotics can aid in achieving United Nations’ Sustainable Development […]

IEEE RoboSoft 2023
Our team will be at the 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023) in Singapore with three contributed papers. “Earthworm-inspired multimodal soft actuators” by Jonathan (Oral, April 4, […]

Earthworm-like modular soft robot
Saravana published a paper on a modular earthworm-inspired soft robot in Scientific Reports. Congratulations, Saravana! He also wrote about this work in a blog post in Nature Portfolio Engineering Community. […]

!brute_force – Soft Resilience
!brute_force is an umbrella title for an ongoing research platform. The work is set up as a grid where a human and a dog climb through a landscape of tiles, […]

Introduction to Soft Robotics 2022
This course is an interdisciplinary introduction to soft robotics and reviews recent works and research in this field. Soft robots are an emerging class of robots that take inspiration from […]


Giving life to robotic skins
A Preview is published by Ahmad Rafsanjani and colleagues from ETH Zurich on the research article “Living skin on a robot” by Takeuchi and coworkers in Matter. Abstract: The skin […]