The work of our PhD student Mads Bering Christiansen is published in the .able journal, an image-based journal at the intersection of art, design, and sciences responding to the complexities […]
Category: Research

Earthworm-Inspired Soft Skin Crawling Robot
The work of our PhD student Jonathan Tirado, “Earthworm-Inspired Soft Skin Crawling Robot”, is published open access in Advanced Science and featured on the front cover. Congratulations, Jonathan! Earthworm-inspired modular […]

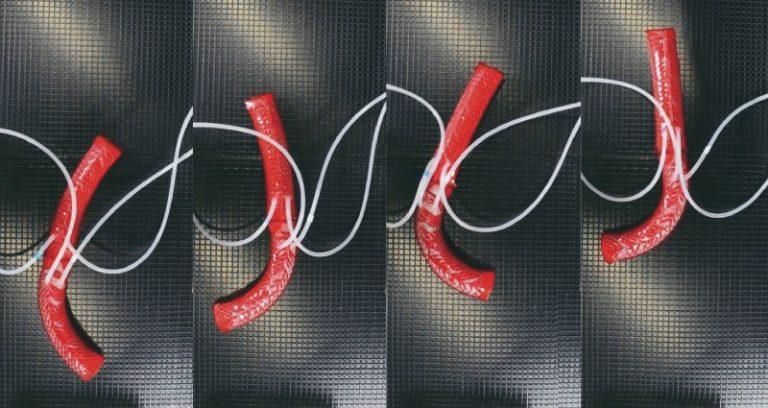
Textile origami snake robot
Our paper on developing a textile origami snake robot for rectilinear locomotion is published in Device. Congratulations, Burcu! Featured inNature Research Highlight: Origami fabric robot slithers like a snake VIDENSKAB.DK: […]

“It Brings the Good Vibes”
Our paper on exploring biomorphic aesthetics in the design of soft personal robots is published in the International Journal of Social Robotics. Congratulations to Mads! Abstract: The flexible bodies of […]
Magnetic kirigami robot
Our recent collaborative work on magnetic kirigami robot is published in Advanced Science journal and featured as a frontispiece. Abstract: Limbless crawling on land requires breaking symmetry of the friction […]


Earthworm-like modular soft robot
Saravana published a paper on a modular earthworm-inspired soft robot in Scientific Reports. Congratulations, Saravana! He also wrote about this work in a blog post in Nature Portfolio Engineering Community. […]

!brute_force – Soft Resilience
!brute_force is an umbrella title for an ongoing research platform. The work is set up as a grid where a human and a dog climb through a landscape of tiles, […]
Curvilinear Kirigami
Abstract: The locomotion of soft snake robots is dependent on frictional interactions with the environment. Frictional anisotropy is a morphological characteristic of snakeskin that allows snakes to engage selectively with […]
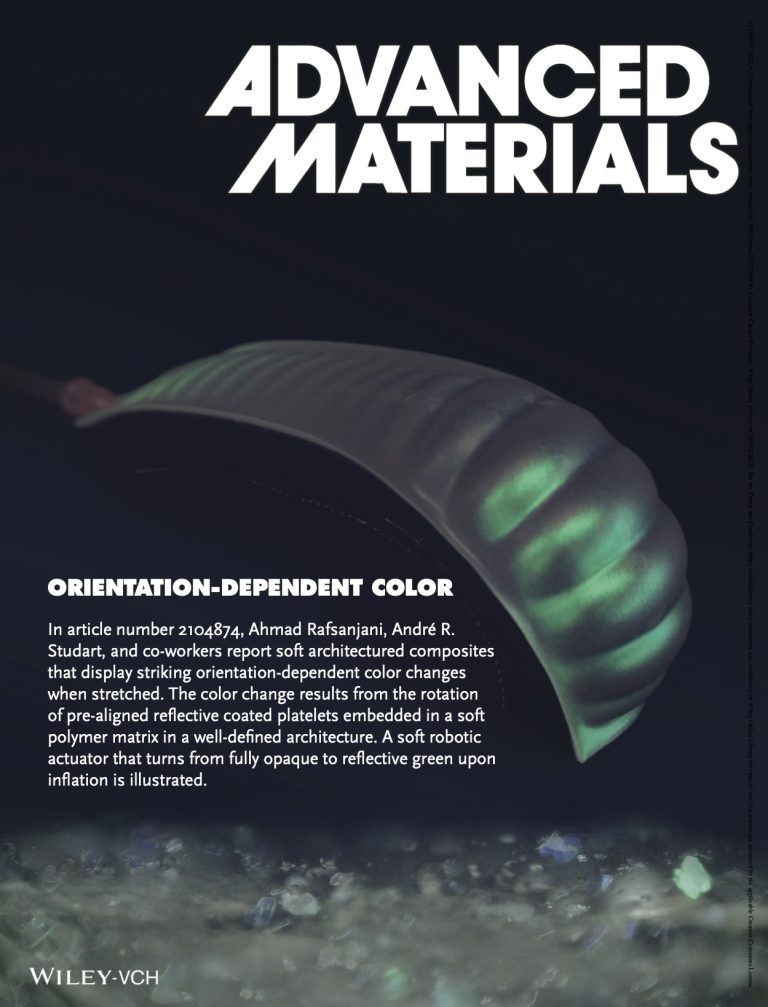
Color changing soft composites
Our article “Stretchable Soft Composites with Strain-Induced Architectured Color” is published in Advanced Materials, and featured as a frontispiece. Abstract: Colors enable interaction and communication between living species in a […]