The position paper presents an argument that aesthetic theory and practice are pertinent to the rapidly expanding field of soft robotics. Soft robotics as an aesthetic phenomenon is introduced and […]
Month: May 2022
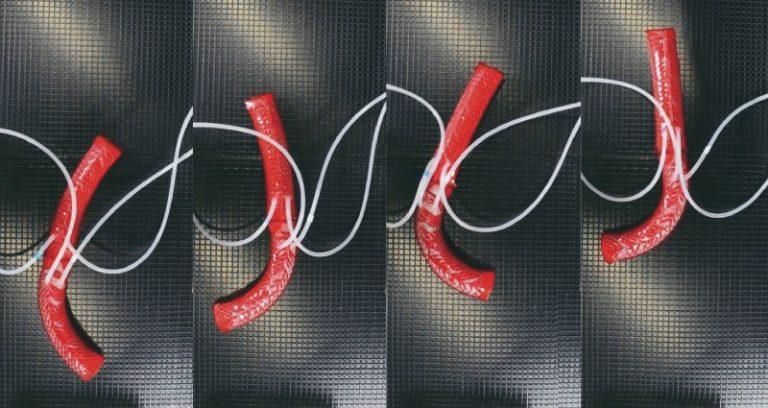
Curvilinear Kirigami
Abstract: The locomotion of soft snake robots is dependent on frictional interactions with the environment. Frictional anisotropy is a morphological characteristic of snakeskin that allows snakes to engage selectively with […]